一臺(tái)機(jī)器為什么能看到你���?那是因?yàn)樗辛?ldquo;眼睛”,也就是視覺���。機(jī)器視覺主要用計(jì)算機(jī)來模擬人的視覺功能���,從客觀事物的圖像中提取信息,進(jìn)行處理并加以理解�,最終用于實(shí)際檢測(cè)�、測(cè)量和控制?�! ?/span>
一、視覺傳感器概述
視覺傳感器是指:利用光學(xué)元件和成像裝置獲取外部環(huán)境圖象信息的儀器����,通常用圖象分辨率來描述視覺傳感器的功能。它的精度不僅與分辨率息息相關(guān)�����,還與被測(cè)物體的WD����、FOV范圍有關(guān)。WD��、FOV大���,成像精度低�����;反之��,成像精度高����。
二、視覺傳感技術(shù)分類
目前����,視覺傳感技術(shù)主要分為以下兩類:
1、3D視覺傳感技術(shù)
在當(dāng)前的視覺系統(tǒng)中��,3D立體成像成為研究熱點(diǎn)���,無需佩戴立體眼鏡就能看到立體圖像成為視覺系統(tǒng)的發(fā)展方向�����。而目前所謂的3D電影和游戲并非整整的3D影像���,這是因?yàn)榕臄z電影時(shí)使用的是單鏡頭攝像機(jī),制作游戲使用的是3D軟件技術(shù)�����,因此��,從制作到顯示都是平面的�����。3D圖象信息的獲取都是基于圖象傳感器獲取����、量化圖象信息,這些圖象信息有直接獲取可見光的圖象����,也有通過檢測(cè)輻射、紅外線��、超聲波等不同形式來獲取圖象信息��。不同傳感器技術(shù)有不同的分辨率����、精度和噪聲,我們可從圖象傳感器提取部分有用的信號(hào)進(jìn)行分析應(yīng)用�。
3D視覺傳感器具有廣泛的用途,比如多媒體手機(jī)���、網(wǎng)絡(luò)攝像���、數(shù)碼相機(jī)、機(jī)器人視覺導(dǎo)航���、汽車安全系統(tǒng)�����、生物醫(yī)學(xué)像素分析�、人機(jī)界面、虛擬現(xiàn)實(shí)�、監(jiān)控、工業(yè)檢測(cè)����、無線遠(yuǎn)距離傳感、顯微鏡技術(shù)�、天文觀察、海洋自主導(dǎo)航���、科學(xué)儀器等等��。這些不同的應(yīng)用均是基于3D視覺圖像傳感器技術(shù)�����。特別是3D影像技術(shù)在工業(yè)控制��、汽車自主導(dǎo)航中具有急迫的應(yīng)用����。
2、智能視覺傳感技術(shù)
智能視覺傳感技術(shù)下的智能視覺傳感器也稱智能相機(jī)��,是近年來機(jī)器視覺領(lǐng)域發(fā)展最快的一項(xiàng)新技術(shù)����。智能相機(jī)是一個(gè)兼具圖像采集��、圖像處理和信息傳遞功能的小型機(jī)器視覺系統(tǒng)��,是一種嵌入式計(jì)算機(jī)視覺系統(tǒng)��。它將圖像傳感器����、數(shù)字處理器、通訊模塊和其他外設(shè)集成到一個(gè)單一的相機(jī)內(nèi)��,由于這種一體化的設(shè)計(jì)��,降低了系統(tǒng)的復(fù)雜度���,易學(xué)�����、易用�����、易維護(hù)�����、安裝方便����,更加可靠穩(wěn)定。同時(shí)系統(tǒng)尺寸大大縮小����,拓寬了視覺技術(shù)的應(yīng)用領(lǐng)域。
三�、視覺傳感技術(shù)的實(shí)現(xiàn)基礎(chǔ)
視覺傳感器的圖像采集單元主要由CCD/CMOS相機(jī)、光學(xué)系統(tǒng)�����、照明系統(tǒng)和圖像采集卡組成,將光學(xué)影像轉(zhuǎn)換成數(shù)字圖像�����,傳遞給圖像處理單元����。通常使用的圖像傳感器件主要有CCD圖像傳感器和CMOS圖像傳感器兩種。下面將兩種傳感器的實(shí)現(xiàn)原理及優(yōu)缺點(diǎn)進(jìn)行詳細(xì)對(duì)比與介紹�����。
四��、視覺傳感技術(shù)的應(yīng)用
1�、汽車車身視覺檢測(cè)系統(tǒng)
車身成型是汽車制造的關(guān)鍵工序之一��,對(duì)車身的各項(xiàng)指標(biāo)要求嚴(yán)格���,需對(duì)車身進(jìn)行100%的檢測(cè)�����。傳統(tǒng)的檢測(cè)方法操作復(fù)雜�����,速度慢��,工期長(zhǎng)�����,只能進(jìn)行抽檢��,難以保證產(chǎn)品的良品率��。
通常��,車身檢測(cè)主要是檢測(cè)車身?yè)躏L(fēng)玻璃尺寸�����、車門安裝處棱邊位置����、定位孔位置等地方。因此視覺傳感器分布于這些位置附近�,測(cè)量其相應(yīng)的棱邊、孔�����、表面的空間位置尺寸。在生產(chǎn)線上設(shè)計(jì)測(cè)量工位���,車身定位后�,置于一框架內(nèi)����,框架由縱橫分布的金屬柱、桿構(gòu)成�����,可根據(jù)需要在框架上靈活安裝視覺傳感器����。根據(jù)測(cè)量點(diǎn)的數(shù)量可安裝相應(yīng)數(shù)量的視覺傳感器(通常情況下每個(gè)視覺傳感器測(cè)量一個(gè)被測(cè)點(diǎn))�����,可根據(jù)實(shí)際需求���,選擇不同形式的傳感器��。
車身檢測(cè)的工作過程為:由生產(chǎn)線運(yùn)送車身到測(cè)量工位進(jìn)行準(zhǔn)確定位�,然后傳感器按要求順序開始工作,計(jì)算機(jī)采集檢測(cè)點(diǎn)圖像并進(jìn)行處理���,計(jì)算出被測(cè)點(diǎn)的空間三維坐標(biāo)��,計(jì)算值與標(biāo)準(zhǔn)值比對(duì)�,得出檢測(cè)結(jié)果�,并將車身送出測(cè)量工位。
2�����、連接器視覺測(cè)量系統(tǒng)
在工業(yè)生產(chǎn)中��,連接器是一類重要的工業(yè)產(chǎn)品�����,而它的質(zhì)量參數(shù)則是制造的重要數(shù)據(jù)���,其中連接器焊腳��、彈高的尺寸�����、間距�、PIN腳、外觀等問題是影像產(chǎn)品質(zhì)量的關(guān)鍵�����。隨著智能產(chǎn)品廣泛使用�,連接器市場(chǎng)供求量大,生產(chǎn)過程中�。傳統(tǒng)人力檢測(cè)難以逐個(gè)排查,人員易疲勞��,管控難����,難以確保產(chǎn)品品質(zhì)���。如今視覺傳感技術(shù)的出現(xiàn)解決了上述問題��,視覺傳感技術(shù)采用的是非接觸式測(cè)量且測(cè)量范圍大��。
視覺測(cè)量系統(tǒng)由相機(jī)���、鏡頭���、光源、控制器�����、圖像采集卡組成�,通過光學(xué)成像原理,自動(dòng)提取被測(cè)物的表面特征�����,將提取的產(chǎn)品數(shù)據(jù)與設(shè)定數(shù)據(jù)對(duì)比��,通過OK或NG信號(hào)��,發(fā)現(xiàn)產(chǎn)品問題�����,管控產(chǎn)品品質(zhì)�。整個(gè)檢測(cè)過程,只需數(shù)秒即可完成����,既滿足了高產(chǎn)量需求����,又可降低成本�,提高生產(chǎn)效率。
3����、三維形貌視覺測(cè)量
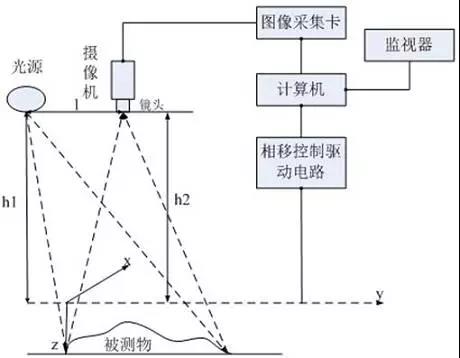
三維形貌數(shù)字化測(cè)量技術(shù)是逆向工程和產(chǎn)品數(shù)字化設(shè)計(jì)、管理及制造的基礎(chǔ)支撐技術(shù)�。它所實(shí)現(xiàn)三維形貌數(shù)字化測(cè)量的機(jī)理是將視覺非接觸、快速測(cè)量和最新的高分辨力數(shù)字成像技術(shù)相結(jié)合���。由于所測(cè)量的物體多是大型����、具有復(fù)雜表面的物體��,測(cè)量通常分為局部三維信息獲取和整體拼接兩部分���,先利用視覺掃描傳感器對(duì)被測(cè)形貌各個(gè)局部區(qū)域進(jìn)行測(cè)量,再采用拼接技術(shù)將各部分形貌進(jìn)行拼接最終得到完整圖像���。
這項(xiàng)傳感器的視覺掃描測(cè)頭采用局域雙目立體視覺測(cè)量原理設(shè)計(jì)�����。形貌整體拼接實(shí)質(zhì)上是將所采集到的數(shù)據(jù)放到公共坐標(biāo)上�,這樣就能得到整體的數(shù)據(jù)描述。通過高分辨率數(shù)碼相機(jī)從測(cè)量空間的上方以不同的角度和位置對(duì)被測(cè)量進(jìn)行數(shù)據(jù)收集�,運(yùn)用光束定向交匯平差原理得到控制點(diǎn)空間坐標(biāo)并建立全局坐標(biāo)系,最后通過各個(gè)坐標(biāo)系進(jìn)行關(guān)聯(lián)���、轉(zhuǎn)換��,完成數(shù)據(jù)拼接��。
視覺源于生物界獲取外部環(huán)境信息的一種方式��,是自然界生物獲取信息的最有效手段�����,是生物智能的核心組成之一��。人類80%的信息都是依靠視覺獲取的�����,基于這一啟發(fā)研究人員開始為機(jī)械安裝“眼睛”�����,使得機(jī)器跟人類一樣通過“看”獲取外界信息��。視覺傳感器技術(shù)的實(shí)質(zhì)就是圖像處理技術(shù)�,通過截取物體表面的信號(hào)繪制成圖像從而呈現(xiàn)在人們的面前,它的出現(xiàn)解決了其他傳感器因場(chǎng)地環(huán)境限制或檢測(cè)設(shè)備龐大而無法操作的問題��,提升了企業(yè)自動(dòng)化生產(chǎn)能力��,因此備受工業(yè)制造界的歡迎�。